
- Citations: 1676
- h-index: 24
- i10-index: 38
Patents
- T. N. Do, M. T. Thai, P. T. Phan, N. H. Lovell, J. Davies, C. C. Nguyen, “Soft robotic arm for in situ 3d bioprinting and surgery,” International Patent, PCT/AU2024/050038.
- T. N. Do, M. T. Thai, P. T. Phan, T. T. Hoang, and N. H. Lovell, “Haptic device,” International Patent, PCT/AU2021/050922.
- T. N. Do, P. T. Phan, T. T. Hoang, M. T. Thai, and N. H. Lovell, “Soft robotic technologies, artificial muscles, grippers and methods of making the same,” International Patent, PCT/AU2021/050924.
- L. Cao, P. T. Phan, and S. J. Phee, “Suturing end-effector,” International Patent, PCT/SG2018/050606.
Journal Articles
- E. Nicotra, J. Davies, B. Sharma, P. T. Phan, N. H. Lovell, and T. N. Do, “End-to-end learning-based bronchoscope tracking enhanced with medical CT imaging and a novel open-source simulator,” IEEE Transactions on Robotics, 2026. Submitted
- H. Truong, C. C. Nguyen, H. T. Truong, S. Wong, K. Zhu, A. JI, J. Davies, E. Nicotra, B. Sharma, J. Wan, P. Pruscino, P. T. Phan, N. H. Lovell, H. P. Phan, T. N. Do, “Advanced flexible robotic systems for early diagnosis and treatment of cancer and cardiovascular diseases”, Advanced Robotics Research, 2026. Submitted
- J. Davies, B. Sharma, A. Ji, G. M. Vasquez, C. C. Nguyen, E. Nicotra, K. Zhu, P. T. Phan, J. Wan, J. Rnjak-Kovacina, M. Stevens, H. P. Phan, C. Hayward, N. H. Lovell, and T. N. Do, “Closed-loop compliance modulation of a soft robotic atrioventricular model of heart failure with preserved ejection fraction”, Nature Communications, 2026. Submitted
- S. Zhao, H. Chen, I. Seeto, P. T. Phan, C. C. Nguyen, T. B. Dang, K. Zhu, M. Listyawan, D. M. Cuong, A. Ma, T. N. Do, and H.-P. Phan, “Wireless, battery-free wearable pressure sensor for compression therapy entirely built on surface mount devices”, Advanced Intelligent Systems, 2026. Submitted
- N. A. Phan, S. T. Ngo, M. T. Phan, N. Q. Duong, P. T. Phan, T. N. Do, P. Cao, G. Krishnan, E. T. Hsiao-Wecksler, and M. T. Thai, “KNEESENSE: a low-cost wearable system with hydraulic filament sensing for real-time knee rehabilitation monitoring,” Scientific Reports, 2026. Submitted
- J. Davies, E. Nicotra, K. Zhu, C. C. Nguyen, B. Sharma, A. Ji, P. T. Phan, J. Wan, P. Pruscino, H. Truong, J. Rnjak-Kovacina, H.-P. Phan, C. Hayward, N. H. Lovell, and T. N. Do, “A soft robotic model for simulating heart valve disease and cardiac interventions,” Advanced Science, 2026. In Press
- D. T. Vu, N. A. Phan, S. T. Ngo, M. T. Phan, T. A. Truong, C. C. Nguyen, P. T. Phan, H.-P. Phan, T. N. Do, and M. T. Thai, “Soft robotics and advanced technologies for minimally invasive bioprinting: the future of internal organ repair,” Advanced Science, 2026. In Press
- T. A. Truong, R. Almasri, X. Huang, S. Zhao, M. J. Barton, T. B. Dang, R. Reshamwala, J. Ingles, M. Xu, P. T. Phan, A. J. Cheng, A. Ashok, A. A. Abed, Y. Q. Liu, T. K. Nguyen, T. N. Do, N. T. Nguyen, H. Zhao, H.-P. Phan, “Flexible and stretchable silicon carbide nanomembranes for implantable applications,” ACS Applied Nano Materials, 2026.
- B. Sharma, J. Davies, A. Ji, K. Zhu, E. Nicotra, C. C. Nguyen, J. Wan, P. T. Phan, P. Pruscino, H. Truong, T. D. Ngo, H. La, V. A. Ho, H.-P. Phan, N. H. Lovell, and T. N. Do, “Model-agnostic fluidic proprioception framework for state estimation and precise movement in soft musculoskeletal robots,” Results in Engineering, vol. 28, p. 107986, 2025.
- E. Nicotra, C. C. Nguyen, J. Davies, P. T. Phan, T. T. Hoang, B. Sharma, A. Ji, K. Zhu, N. H. Lovell, and T. N. Do, “Soft robotic catheter for safe aneurysm treatment with enhanced kinematics and contact force model,” IEEE Transactions on Medical Robotics and Bionics, 2025.
- P. Pruscino, P. T. Phan, J. Davies, B. Sharma, T. Guo, C. C. Nguyen, N. H. Lovell, and T. N. Do, “A proof-of-concept assessment of a novel wearable eyelid muscle device: a pre-clinical animal cadaver study for eyelid closure restoration,” Advanced Robotics Research, p. 202500048, 2025.
- K. Zhu, C. C. Nguyen, B. Sharma, P. T. Phan, T. T. Hoang, J. Davies, A. Ji, E. Nicotra, J. Wan, P. Pruscino, S. Walia, T. T. V-Doan, S. J. Phee, S. Wong, N. H. Lovell, and T. N. Do, “Development of a bio-inspired soft robotic system for teleoperated endoscopic surgery,” Cyborg and Bionic Systems, vol. 6, 2025.
- G. K. Jalandhra, L. Srethbhakdi, J. Davies, C. C. Nguyen, P. T. Phan, Z. Och, A. Ashok, K. S. Lim, H.-P. Phan, T. N. Do, N. H. Lovell, and J. Rnjak-Kovacina, “Materials advances in devices for heart disease interventions,” Advanced Materials, p. e2420114, 2025.
- C. C. Nguyen, J. Davies, A. Ashok, T. T. Hoang, A. Ahteda, D. T. Bach, E. Nicotra, H. A. Tran, B. Sharma, K. Zhu, P. T. Phan, A. Ji, J. Wan, J. Rnjak-Kovacina, O. Vittorio, H.-P. Phan, N. H. Lovell, and T. N. Do, “Motor-free soft robots for cancer detection, surgery, and in-situ bioprinting,” Advanced Healthcare Materials, p. e2404623, 2025.
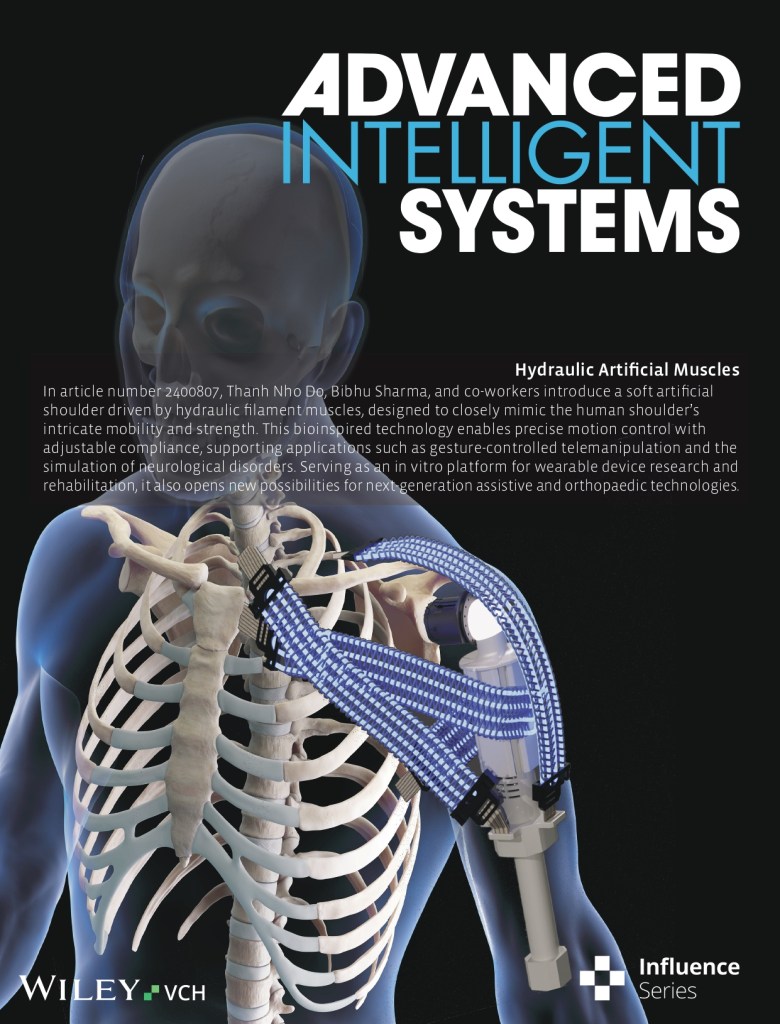
- B. Sharma, J. Davies, E. Nicotra, A. Ji, K. Zhu, P. T. Phan, C. C. Nguyen, T. T. Hoang, J. Wan, H.-P. Phan, N. H. Lovell, and T. N. Do, “A soft robotic textile-actuated anthropomorphic artificial shoulder mechanism,” Advanced Intelligent Systems, vol. 7, no. 4, p. 2400807, 2025. Frontispiece
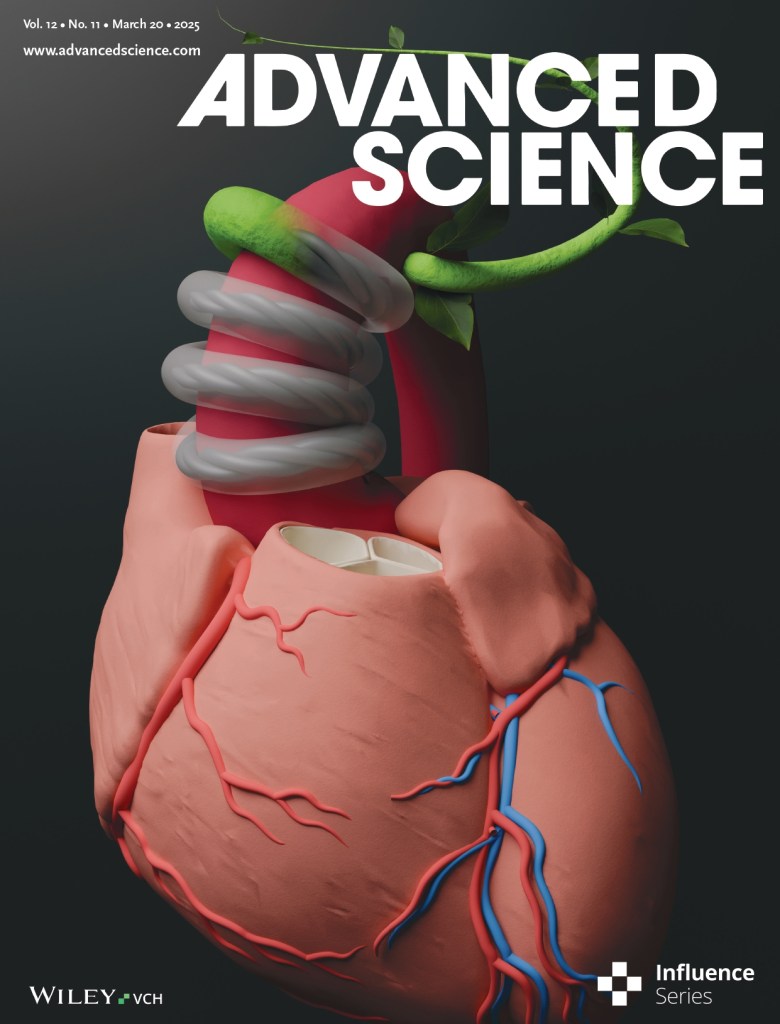
- A. Ji, J. Davies, P. T. Phan, C. C. Nguyen, B. Sharma, K. Zhu, E. Nicoltra, J. Wan, H.-P. Phan, C. Hayward, N. H. Lovell, and T. N. Do, “Development of a self-deploying extra-aortic compression device for medium-term hemodynamic stabilization: a feasibility study,” Advanced Science, vol. 12, no. 11, p. e2412120, 2025. Front Cover
- B. Sharma, P. T. Phan, J. Davies, T. T. Hoang, C. C. Nguyen, A. Ji, K. Zhu, E. Nicotra, N. H. Lovell, and T. N. Do, “Soft upper-limb wearable robotic devices: technology and applications,” Advanced Intelligent Systems, vol. 6, no. 12, p. 2400266, 2024.
- J. Davies, M. T. Thai, B. Sharma, T. T. Hoang, C. C. Nguyen, P. T. Phan, T. N. A. M. Vuong, A. Ji, K. Zhu, E. Nicoltra, Y. -C. Toh, M. Stevens, C. Hayward, H.-P. Phan, N. H. Lovell, and T. N. Do, “Soft robotic artificial left ventricle simulator capable of reproducing myocardial biomechanics”, Science Robotics, vol. 9, no. 94, p. eado4553, 2024.
- C. C. Nguyen, T. T. Hoang, J. Davies, P. T. Phan, M. T. Thai, E. Nicotra, A. Al-Abed, H. A. Tran, T-A. Truong, B. Sharma, A. Ji, K. Zhu, C. H. Wang, H.-P. Phan, N. H. Lovell, and T. N. Do, “Soft fibrous syringe architecture for electricity-free and motorless control of flexible robotic systems”, Advanced Science, vol. 11, no. 39, p. e2405610, 2024.
- T. T. Hoang, C. C. Nguyen, P. T. Phan, J. Davies, H. A. Tran, M. T. Thai, V. K. Truong, T.-K. Nguyen, T. T. Vo-Doan, H.-P. Phan, N. H. Lovell, and T. N. Do, “Shape programmable and multifunctional soft textile muscles for wearable and soft robotics,” Advanced Intelligent Systems, vol. 6, no. 9, p. 2300875, 2024.
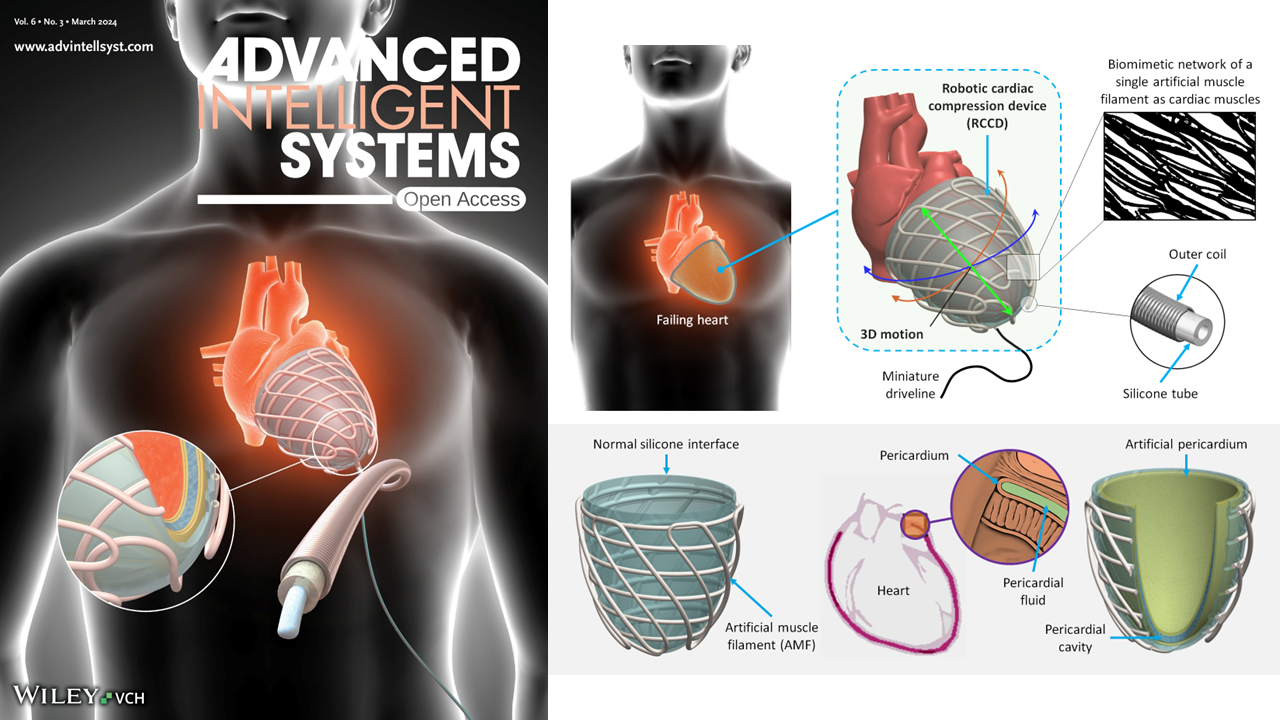
- P. T. Phan, J. Davies, T. T. Hoang, M. T. Thai, C. C. Nguyen, A. Ji, K. Zhu, B. Sharma, E. Nicotra, C. Hayward, H. -P. Phan, N. H. Lovell, and T. N. Do, “Robotic cardiac compression device using artificial muscle filaments for the treatment of heart failure”, Advanced Intelligent Systems, vol. 6, no. 3, p. 2300464, 2024. Inside Front Cover
- K. Zhu, P. T. Phan, B. Sharma, J. Davies, M. T. Thai, T. T. Hoang, C. C. Nguyen, A. Ji, E. Nicotra, H. M. La, T. T. Vo-Doan, H. -P. Phan, N. H. Lovell, and T. N. Do, “A smart, textile-driven, soft exosuit for spinal assistance”, Sensors, vol. 23, no. 19, 2023.
- M. T. Thai, J. Davies, C. C. Nguyen, P. T. Phan, T. T. Hoang, A. Ji, K. Zhu, B. Sharma, E. Nicotra, T. T. Vo-Doan, H.-P. Phan, N. H. Lovell, and T. N. Do, “Soft wearable haptic display and flexible 3D force sensor for teleoperated surgical systems”, Advanced Sensor Research, vol. 3, no. 1, p. 2300105, 2023. Inside Front Cover
- P. T. Phan, D. Welch, J. Spiggle, M. T. Thai, T. T. Hoang, J. Davies, C. C. Nguyen, K. Zhu, H. -P. Phan, N. H. Lovell, and T. N. Do, “Fabrication, nonlinear modeling, and control of woven hydraulic artificial muscles for wearable applications,” Sensors and Actuators A: Physical, vol. 360, p. 114555, 2023.
- C. C. Nguyen, M. T. Thai, T. T. Hoang, J. Davies, P. T. Phan, K. Zhu, L. Wu, M. A. Brodie, D. Tsai, Q. P. Ha, H. -P. Phan, N. H. Lovell, and T. Nho Do, “Development of a soft robotic catheter for vascular intervention surgery,” Sensors and Actuators A: Physical, vol. 357, p. 114380, 2023.
- C. C. Nguyen, T. Teh, M. T. Thai, P. T. Phan, T. T. Hoang, J. Davies, H. -P. Phan, C. H. Wang, N. H. Lovell, and T. N. Do, “A handheld hydraulic soft robotic device with bidirectional bending end-effector for minimally invasive surgery,” IEEE Transactions on Medical Robotics and Bionics, vol. 5, no. 3, pp. 590-601, 2023.
- J. Davies, M. T. Thai, H. Low, P. T. Phan, T. T. Hoang, N. H. Lovell, and T. N. Do, “Bio-SHARP: bioinspired soft and high aspect ratio pump for robotic and medical applications,” Soft Robotics, vol. 10, no. 6, pp. 1055-1069, 2023.
- M. T. Thai, P. T. Phan, H. A. Tran, C. C. Nguyen, T. T. Hoang, J. Davies, J. Rnjak-Kovacina, H. -P. Phan, N. H. Lovell, and T. N. Do, “Advanced soft robotic system for in situ 3D bioprinting and endoscopic surgery,” Advanced Science, vol. 10, no. 12, p. e2205656, 2023.
- C. C. Nguyen, S. Wong, M. T. Thai, T. T. Hoang, P. T. Phan, J. Davies, L. Wu, D. Tsai, H. -P. Phan, N. H. Lovell, and T. N. Do, “Advanced user interfaces for teleoperated surgical robotic systems,” Advanced Sensor Research, vol. 2, no. 4, p. 2200036, 2023.
- J. Davies, M. T. Thai, T. T. Hoang, C. C. Nguyen, P. T. Phan, H. -P. Phan, N. H. Lovell, and T. N. Do, “A stretchable filament sensor with tuneable sensitivity for wearable robotics and healthcare applications,” Advanced Materials Technologies, vol. 8, no. 6, p. 2201453, 2023. Inside Front Cover
- T. T. Hoang, P. T. Phan, M. T. Thai, J. Davies, C. C. Nguyen, H. -P. Phan, N. H. Lovell, and T. N. Do, “Magnetically engineered conductivity of soft liquid metal composites for robotic, wearable electronic, and medical applications,” Advanced Intelligent Systems, vol. 4, no. 12, p. 2200282, 2022. Inside Front Cover
- P. T. Phan, M. T. Thai, T. T. Hoang, J. Davies, C. C. Nguyen, H. -P. Phan, N. H. Lovell, and T. N. Do, “Smart textiles using fluid-driven artificial muscle fibers,” Scientific Reports, vol. 12, no. 1, p. 11067, 2022.
- T. T. Hoang, L. Sy, M. Bussu, M. T. Thai, H. Low, P. T. Phan, J. Davies, C. C. Nguyen, N. H. Lovell, and T. N. Do, “A wearable soft fabric sleeve for upper limb augmentation,” Sensors, vol. 21, no. 22, 2021.
- P. T. Phan, T. T. Hoang, M. T. Thai, H. Low, J. Davies, N. H. Lovell, and T. N. Do, “Smart surgical sutures using soft artificial muscles,” Scientific Reports, vol. 11, no. 1, p. 22420, 2021.
- P. T. Phan, T. T. Hoang, M. T. Thai, H. Low, N. H. Lovell, and T. N. Do, “Twisting and braiding fluid-driven soft artificial muscle fibers for robotic applications,” Soft Robotics, vol. 9, no. 4, pp. 820-836, 2022.
- M. T. Thai, P. T. Phan, T. T. Hoang, H. Low, N. H. Lovell, and T. N. Do, “Corrections to “Design, fabrication, and hysteresis modeling of soft microtubule artificial muscle (SMAM) for medical applications” [Jul 21 5089-5096],” IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 8409-8409, 2021.
- M. Miyasaka, A. M. H. Tiong, P. T. Phan, Y. Huang, H. L. Kaan, K. Y. Ho, and S. J. Phee, “Two magnetic sensor based real-time tracking of magnetically inflated swallowable intragastric balloon,” Annals of Biomedical Engineering, vol. 49, no. 7, pp. 1735-1746, 2021.
- T. T. Hoang, J. J. S. Quek, M. T. Thai, P. T. Phan, N. H. Lovell, and T. N. Do, “Soft robotic fabric gripper with gecko adhesion and variable stiffness,” Sensors and Actuators A: Physical, vol. 323, p. 112673, 2021.
- P. T. Phan, A. M. H. Tiong, M. Miyasaka, L. Cao, H. L. Kaan, K. Y. Ho, and S. J. Phee, “EndoPil: a magnetically actuated swallowable capsule for weight management: development and trials,” Annals of Biomedical Engineering, vol. 49, no. 5, pp. 1391-1401, 2021.
- M. T. Thai, P. T. Phan, T. T. Hoang, H. Low, N. H. Lovell, and T. N. Do, “Design, fabrication, and hysteresis modeling of soft microtubule artificial muscle (SMAM) for medical applications,” IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 5089-5096, 2021.
- P. T. Phan, M. T. Thai, T. T. Hoang, N. H. Lovell, and T. N. Do, “HFAM: soft hydraulic filament artificial muscles for flexible robotic applications,” IEEE Access, vol. 8, pp. 226637-226652, 2020.
- T. T. Hoang, P. T. Phan, M. T. Thai, N. H. Lovell, and T. N. Do, “Bio‐inspired conformable and helical soft fabric gripper with variable stiffness and touch sensing,” Advanced Materials Technologies, vol. 5, no. 12, p. 2000724, 2020.
- M. T. Thai, T. T. Hoang, P. T. Phan, N. H. Lovell, and T. N. Do, “Soft microtubule muscle-driven 3-axis skin-stretch haptic devices,” IEEE Access, vol. 8, pp. 157878-157891, 2020.
- M. T. Thai, P. T. Phan, T. T. Hoang, S. Wong, N. H. Lovell, and T. N. Do, “Advanced intelligent systems for surgical robotics,” Advanced Intelligent Systems, vol. 2, no. 8, p. 1900138, 2020.
- H. M. Le, P. T. Phan, L. Cao, J. Liu, and S. J. Phee, “A temperature-dependent, variable-stiffness endoscopic robotic manipulator with active heating and cooling,” Annals of Biomedical Engineering, vol. 48, no. 6, pp. 1837-1849, 2020.
- H. L. Kaan, P. T. Phan, A. M. H. Tiong, M. Miyasaka, S. J. Phee, and K. Y. Ho, “First-in-man feasibility study of a novel ingestible magnetically inflated balloon capsule for treatment of obesity,” Endoscopy International Open, vol. 8, no. 5, pp. E607-E610, 2020.
- L. Cao, X. Li, P. T. Phan, A. M. H. Tiong, H. L. Kaan, J. Liu, W. Lai, Y. Huang, H. M. Le, M. Miyasaka, K. Y. Ho, P. W. Y. Chiu, and S. J. Phee, “Sewing up the wounds: a robotic suturing system for flexible endoscopy,” IEEE Robotics & Automation Magazine, vol. 27, no. 3, pp. 45-54, 2020.
- Y. Huang, E. Burdet, L. Cao, P. T. Phan, A. M. H. Tiong, and S. J. Phee, “A subject-specific four-degree-of-freedom foot interface to control a surgical robot,” IEEE/ASME Transactions on Mechatronics, vol. 25, no. 2, pp. 951-963, 2020.
- W. Lai, L. Cao, R. X. Tan, Y. C. Tan, X. Li, P. T. Phan, A. M. H. Tiong, S. C. Tjin, and S. J. Phee, “An integrated sensor-model approach for haptic feedback of flexible endoscopic robots,” Annals of Biomedical Engineering, vol. 48, no. 1, pp. 342-356, 2020.
- W. Lai, L. Cao, R. X. Tan, P. T. Phan, J. Hao, S. C. Tjin, and S. J. Phee, “Force sensing with 1 mm fiber bragg gratings for flexible endoscopic surgical robots,” IEEE/ASME Transactions on Mechatronics, vol. 25, no. 1, pp. 371-382, 2020.
- X. Li, A. M. H. Tiong, L. Cao, W. Lai, P. T. Phan, and S. J. Phee, “Deep learning for haptic feedback of flexible endoscopic robot without prior knowledge on sheath configuration,” International Journal of Mechanical Sciences, vol. 163, p. 105129, 2019.
- L. Cao, H. L. Kaan, X. Li, P. T. Phan, A. M. H. Tiong, K. Y. Ho, P. W. Y. Chiu, and S. J. Phee, “Endoscopic suturing using a computer-controlled master and slave robot: animal study,” in 27th International Congress of the European Association for Endoscopic Surgery (EAES) Sevilla, Spain, 12–15 June 2019, Surgical Endoscopy, vol. 33, no. 2, pp. 485-781, 2019.
- Y. Huang, E. Burdet, L. Cao, P. T. Phan, A. M. H. Tiong, P. Zheng, and S. J. Phee, “Performance evaluation of a foot interface to operate a robot arm,” IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 3302-3309, 2019.
- P. T. Phan, A. M. Tiong, M. Miyasaka, K. Y. Ho, and S. J. Phee, “951c – Magnetically activated ingestible weight management balloon capsule,” Gastroenterology, vol. 156, no. 6, pp. S-1510, 2019.
- X. Li, L. Cao, A. M. H. Tiong, P. T. Phan, and S. J. Phee, “Distal-end force prediction of tendon-sheath mechanisms for flexible endoscopic surgical robots using deep learning,” Mechanism and Machine Theory, vol. 134, pp. 323-337, 2019.
Conference Proceedings
- B. Sharma, E. Nicotra, J. Davies, C. C. Nguyen, P. T. Phan, A. Ji, K. Zhu, J. Wan, T. D. Ngo, H. La, V. A. Ho, N. H. Lovell, and T. N. Do, “Compliance control with dynamic and self-sensing hydraulic artificial muscles for wearable assistive devices,” in 2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta, USA, 2025. In press
- E. Nicotra, C. C. Nguyen, J. Davies, P. T. Phan, T. T. Hoang, B. Sharma, A. Ji, K. Zhu, T. D. Ngo, V. A. Ho, H. M. La, N. H. Lovell, and T. N. Do, “A soft micro-robotic catheter for aneurysm treatment: a novel design and enhanced Euler-Bernoulli model with cross-section optimization”, in 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024, pp. 11585-11591.
- K. Zhu, B. Sharma, P. T. Phan, J. Davies, M. T. Thai, T. T. Hoang, C. C. Nguyen, A. Ji, E. Nicotra, N. H. Lovell, and T. N. Do, “Development of a smart textile-driven soft spine exosuit for lifting tasks in industrial applications”, in 2024 IEEE/SICE International Symposium on System Integration (SII), Ha Long, Vietnam, 2024, pp. 13-18.
- J. Davies, M. T. Thai, T. T. Hoang, C. C. Nguyen, P. T. Phan, K. Zhu, D. B. N. Tran, V. A. Ho, H. M. La, Q. P. Ha, N. H. Lovell, and T. N. Do, “A flexible 3D force sensor with in-situ tunable sensitivity,” in 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 2023, pp. 581-587.
- C. C. Nguyen, J. Davies, M. T. Thai, T. T. Hoang, P. T. Phan, K. Zhu, D. B. N. Tran, V. A. Ho, H. M. La, H.-P. Phan, N. H. Lovell, and T. N. Do, “A handheld hydraulic cardiac catheter with omnidirectional manipulator and touch sensing,” in 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 2023, pp. 4682-4688.
- J. Davies, P. T. Phan, D. Huang, T. T. Hoang, H. Low, M. T. Thai, C. C. Nguyen, E. Nicotra, N. H. Lovell, and T. N. Do, “Hydraulically actuated soft tubular gripper,” in 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, USA, 2022, pp. 6144-6150.
- C. C. Nguyen, T. Teh, M. T. Thai, P. T. Phan, T. T. Hoang, H. Low, J. Davies, E. Nicotra, N. H. Lovell, and T. N. Do, “Bidirectional soft robotic catheter for arrhythmia treatment,” in 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, USA, 2022, pp. 9579-9585.
- L. Sy, T. T. Hoang, M. Bussu, M. T. Thai, P. T. Phan, H. Low, D. Tsai, M. A. Brodie, N. H. Lovell, and T. N. Do, “M-SAM: miniature and soft artificial muscle-driven wearable robotic fabric exosuit for upper limb augmentation,” in 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), Yale University, USA, 2021, pp. 575-578.
- W. Lai, L. Cao, P. T. Phan, I. W. Wu, S. C. Tjin, and S. J. Phee, “Joint rotation angle sensing of flexible endoscopic surgical robots,” in 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 2020, pp. 4789-4795.
- L. Cao, X. Li, P. T. Phan, A. M. H. Tiong, H. L. Kaan, K. Y. Ho, P. W. Y. Chiu, and S. J. Phee, “A flexible endoscopic robotic suturing system for gastrointestinal perforations: animal study,” in The Hamlyn Symposium on Medical Robotics, London, UK, 2019, vol. 12, pp. 97-98.
- L. Cao, X. Li, P. T. Phan, A. M. H. Tiong, J. Liu, and S. J. Phee, “A novel robotic suturing system for flexible endoscopic surgery,” in 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 2019, pp. 1514-1520.
- W. Lai, L. Cao, Z. Xu, P. T. Phan, P. Shum, and S. J. Phee, “Distal end force sensing with optical fiber bragg gratings for tendon-sheath mechanisms in flexible endoscopic robots,” in 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 2018, pp. 1-5.
- T. N. Do, P. T. Phan, K. Y. Ho, and S. J. Phee, “A magnetic soft endoscopic capsule for non-surgical overweight and obese treatments,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 2016, pp. 2388-2393.
Robotic cardiac compression device 
Advanced soft robotic system for in situ 3D bioprinting and endoscopic surgery 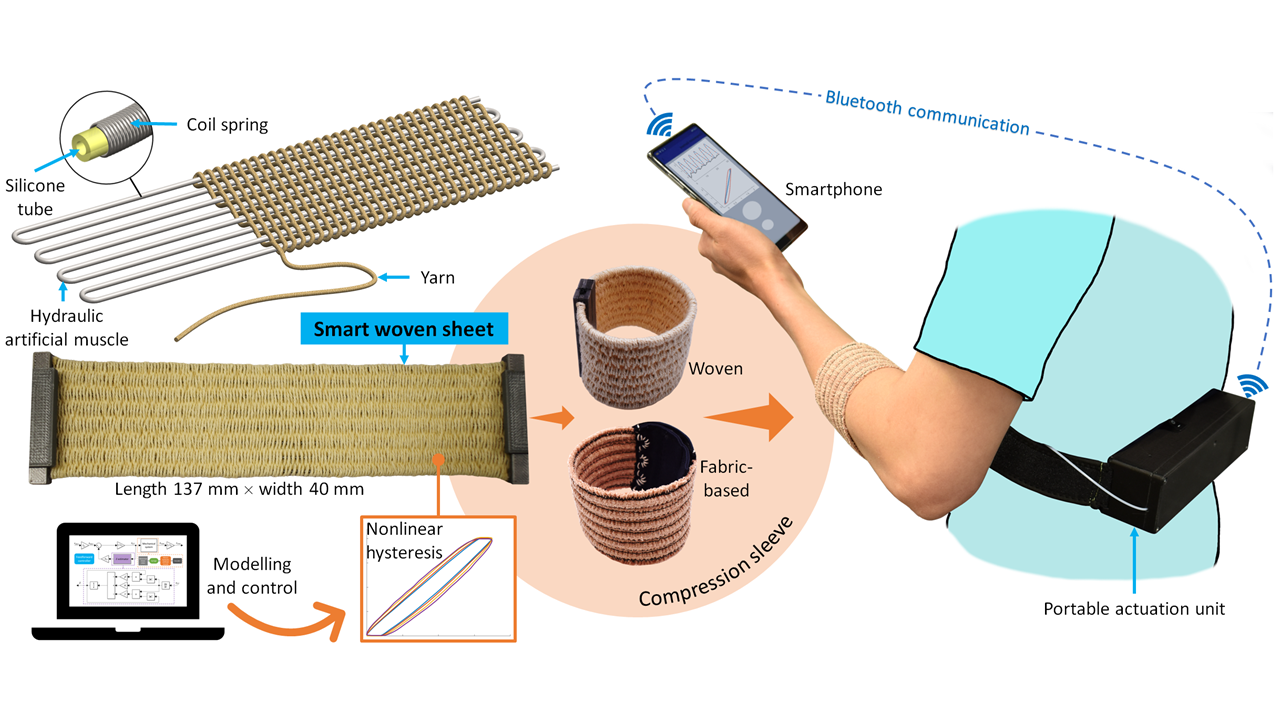
Woven hydraulic artificial muscles for wearable applications 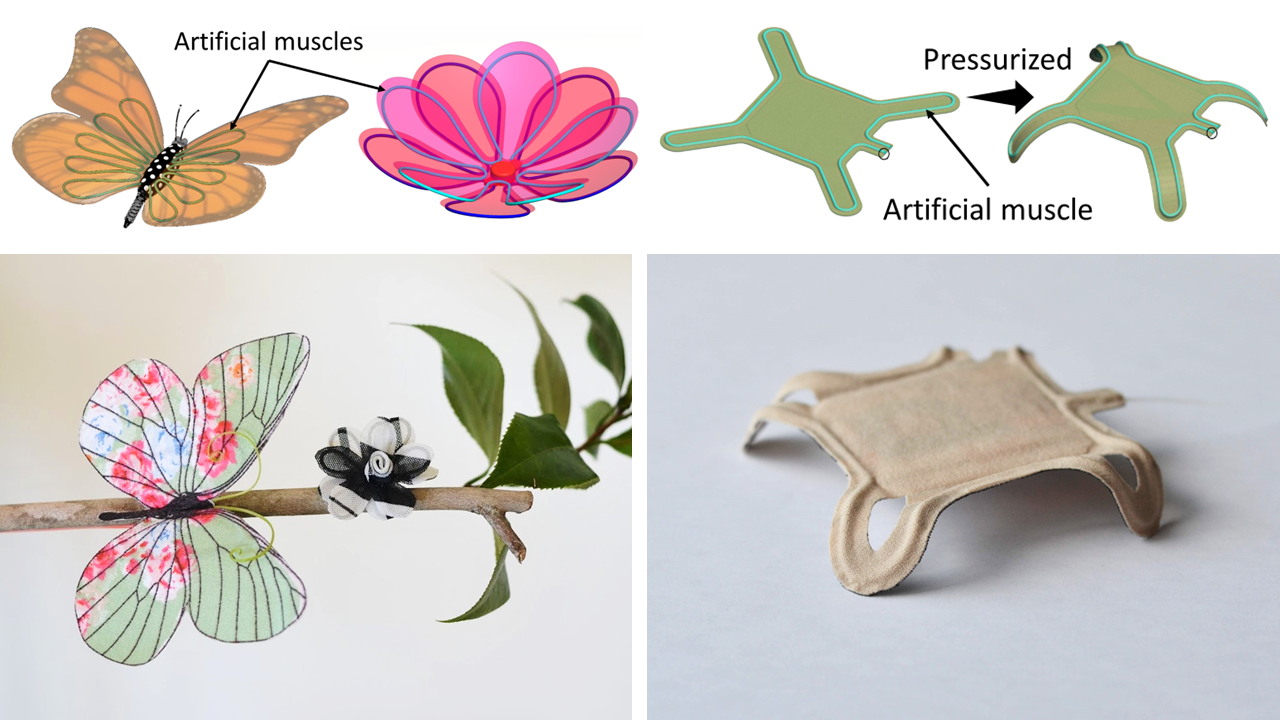
Smart textiles, bioinspired soft robots using fluid-driven artificial muscle fibers 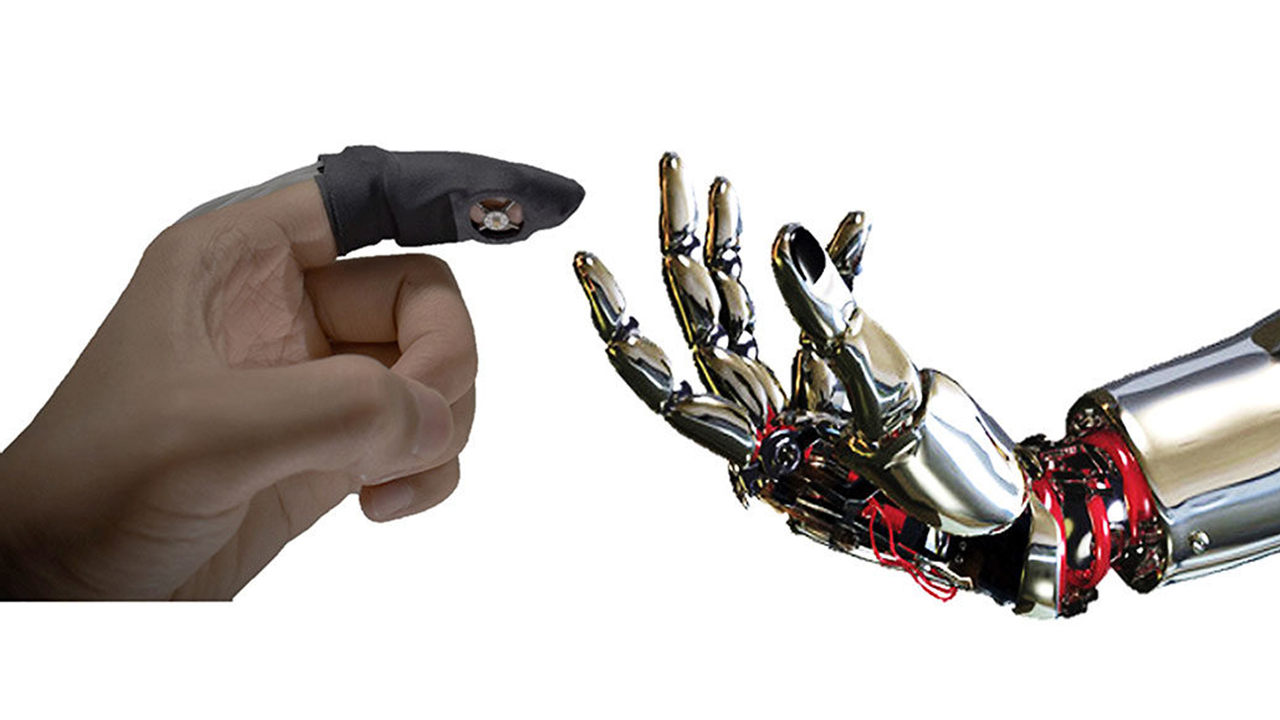
Soft microtubule muscle-driven 3-axis skin-stretch haptic devices 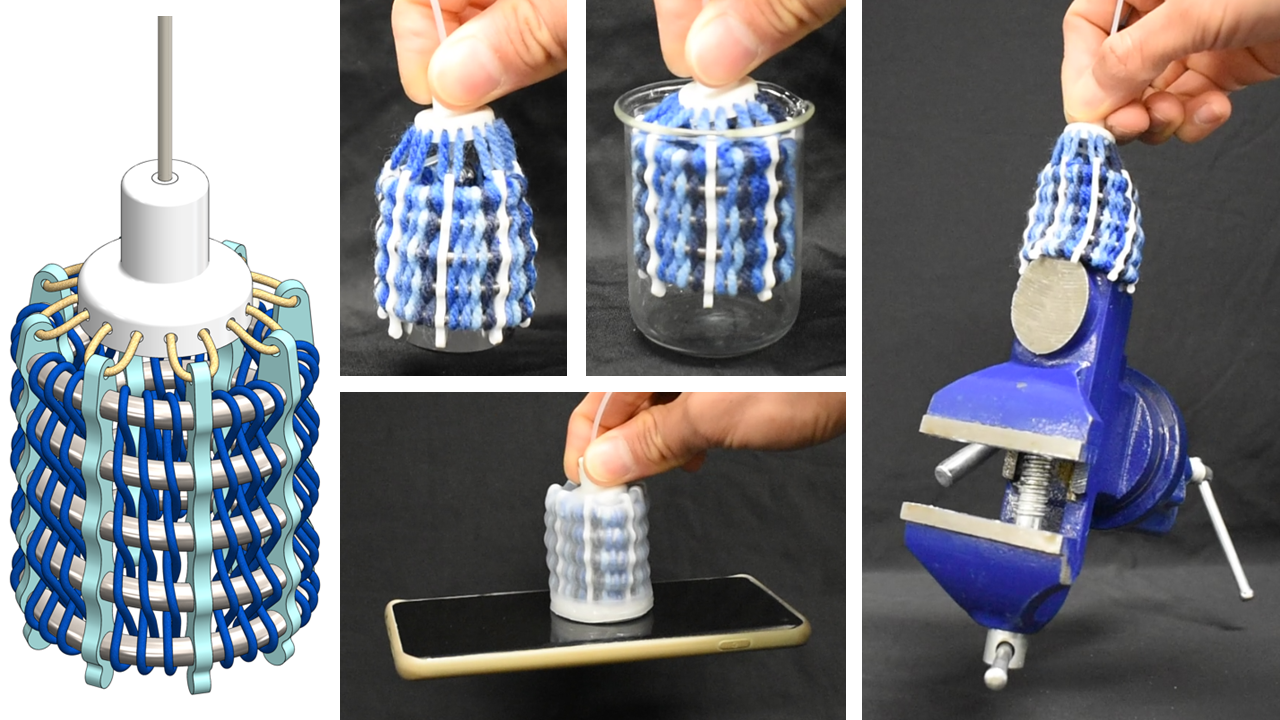
Hydraulically actuated soft tubular gripper 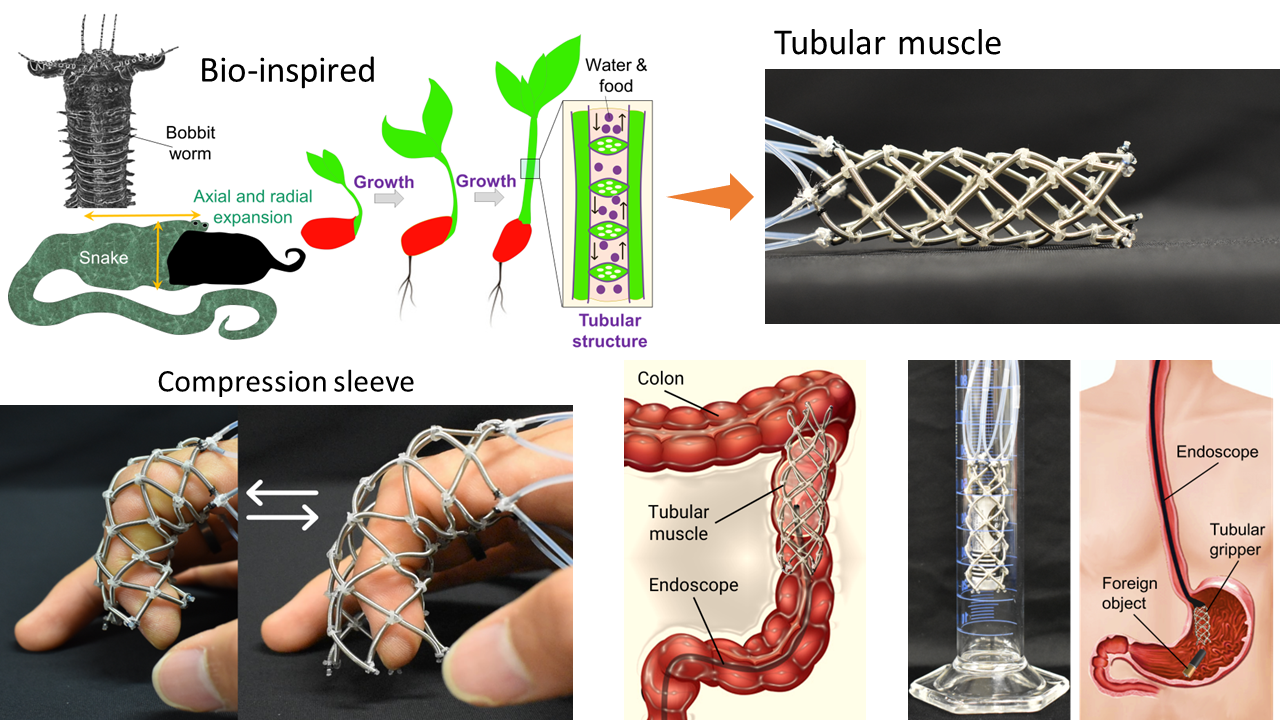
Bioinspired growing soft tubular muscle 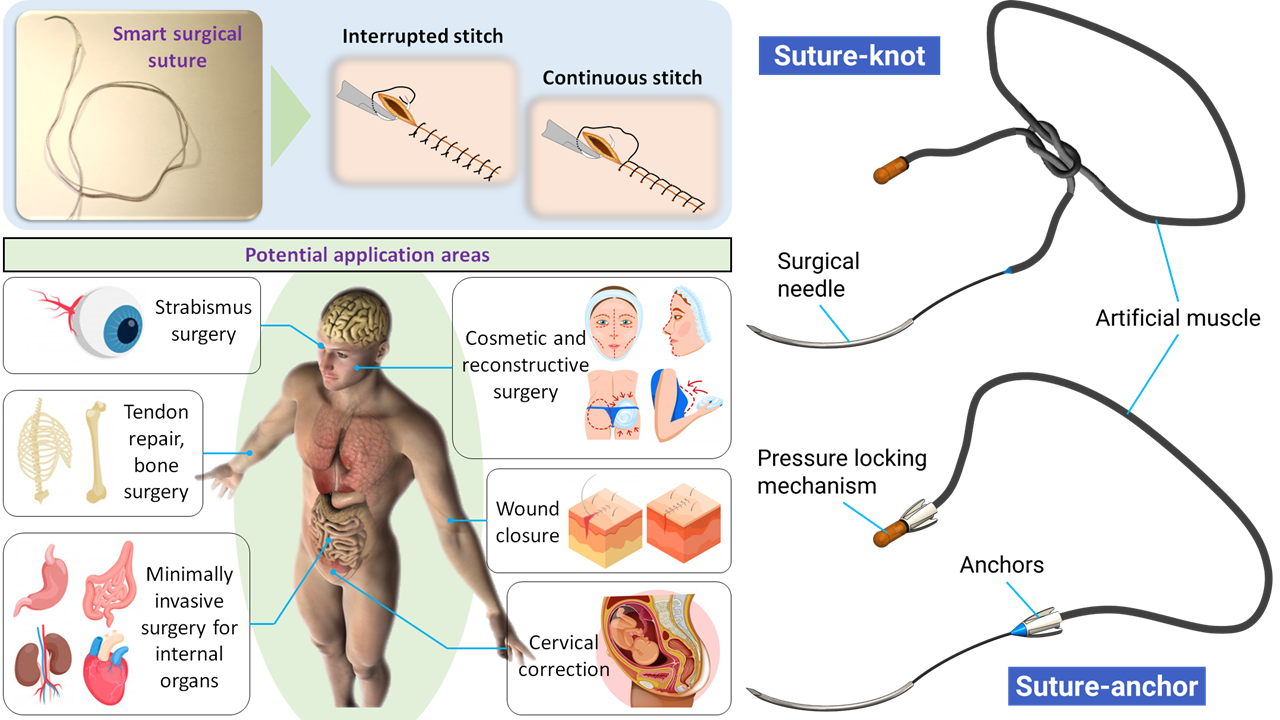
Smart surgical sutures using soft artificial muscles 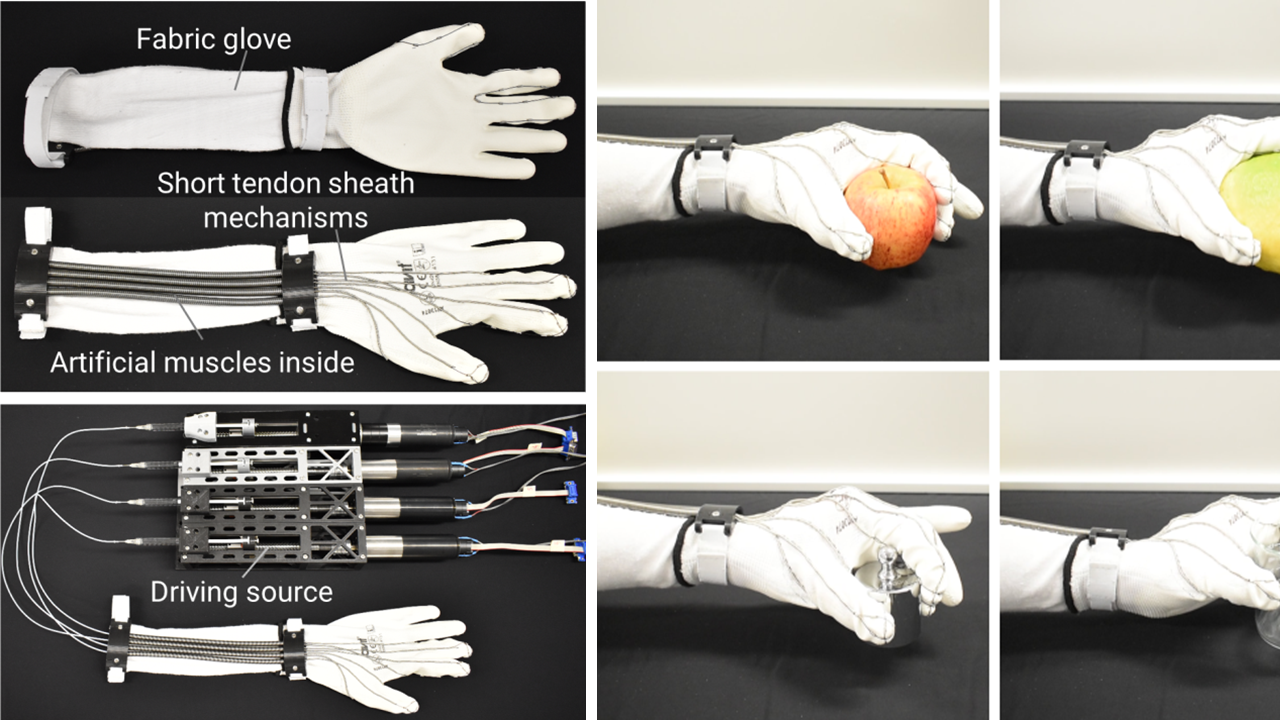
Soft wearable robotic glove 
Bio‐inspired conformable and helical soft fabric gripper with variable stiffness and touch sensing 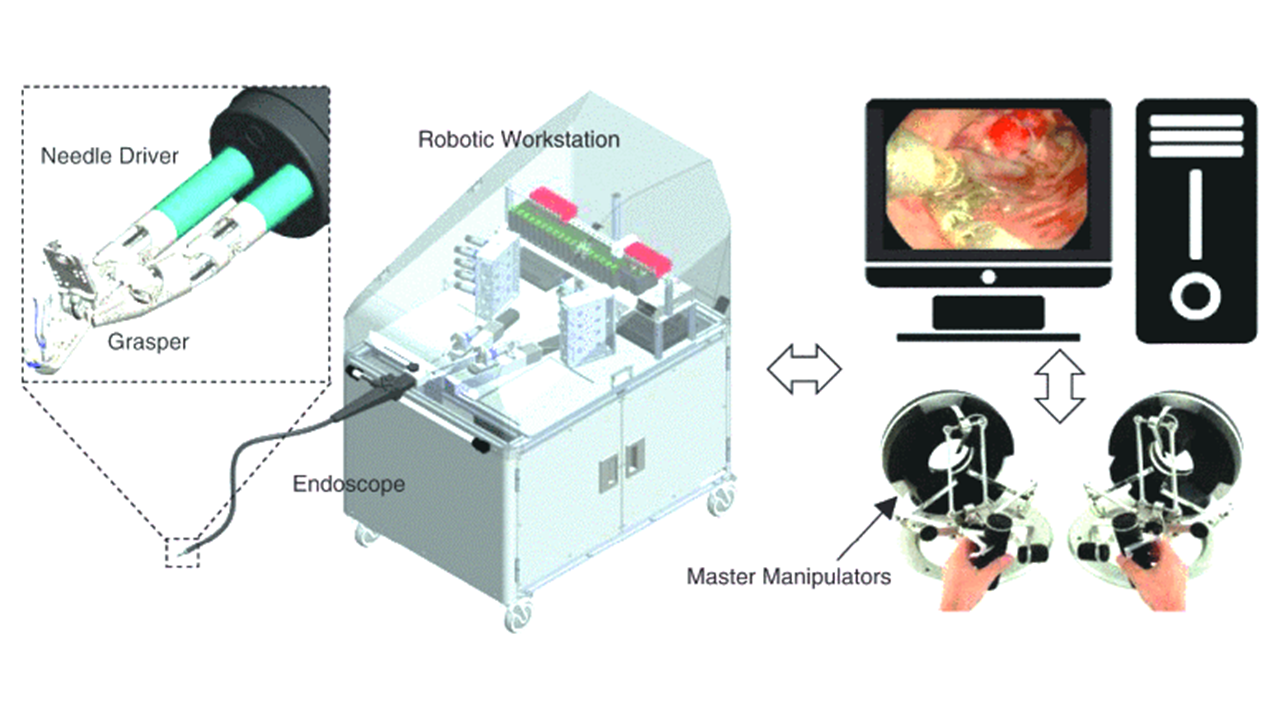
Robotic suturing system for flexible endoscopy 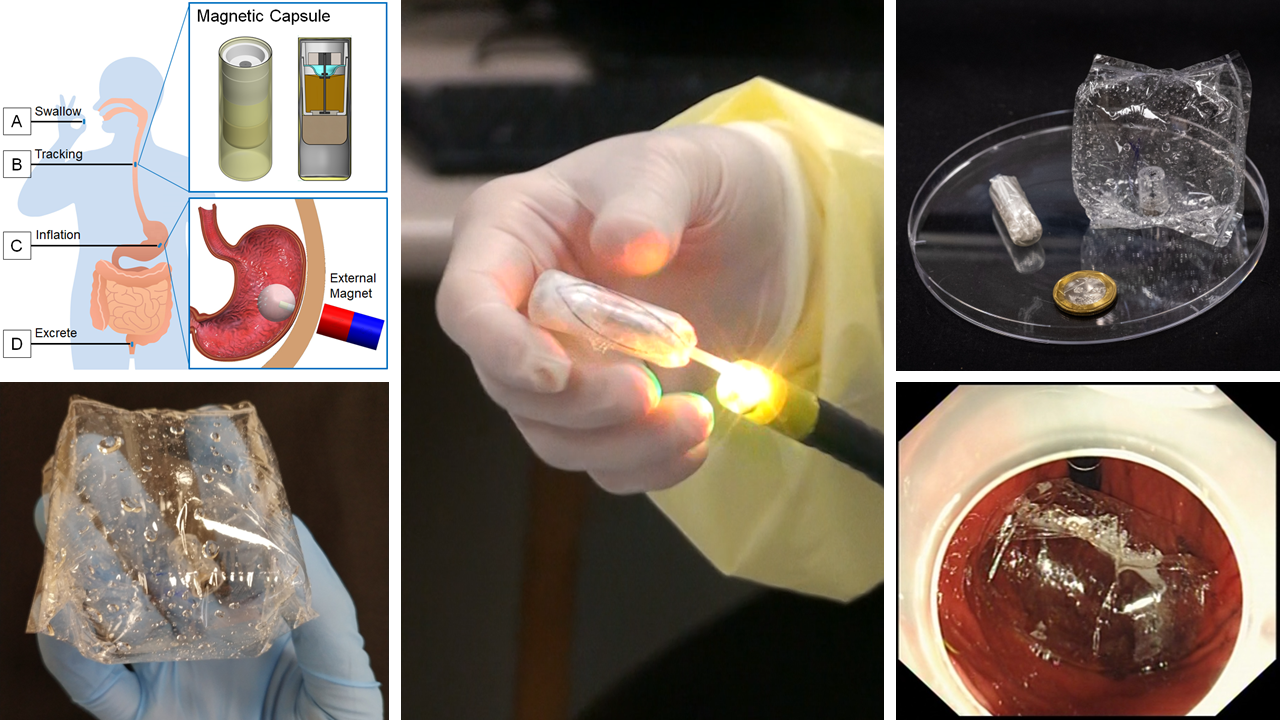
Magnetically actuated swallowable capsule for weight management
